Učení bez učitele
Učení bez učitele je odvětvím strojového učení zaměřeným na hledání vzorů, struktur a vztahů v neoznačených datech, což umožňuje úlohy jako shlukování, redukci ...
6 min čtení
Unsupervised Learning
Machine Learning
+3
Chyba zobecnění je klíčovou metrikou ve strojovém učení, která kvantifikuje schopnost modelu předpovídat výsledky pro neznámá data a zajišťuje robustní výkon v reálných podmínkách.
Chyba zobecnění, často označovaná také jako chyba mimo vzorek (out-of-sample error) nebo riziko, je základním pojmem ve strojovém učení a teorii statistického učení. Udává, jak dobře dokáže model nebo algoritmus předpovídat výsledky pro neznámá data na základě tréninku na konečném vzorku dat. Hlavním cílem posouzení chyby zobecnění je pochopit schopnost modelu dobře fungovat i na nových, dosud neviděných datech, nejen na těch, na kterých byl natrénován. Tento koncept je zásadní pro vývoj modelů, které jsou přesné i robustní v reálných aplikacích.
Chyba zobecnění je v jádru rozdíl mezi predikcemi modelu a skutečnými výsledky na nových datech. Tato chyba vzniká z různých zdrojů, včetně nepřesností modelu, chyb při vzorkování a přirozeného šumu v datech. Zatímco některé z těchto chyb lze minimalizovat technikami jako je výběr modelu a ladění parametrů, jiné, například šum, jsou neodstranitelné.
V kontextu učení s učitelem (supervised learning) slouží chyba zobecnění jako klíčová metrika pro hodnocení výkonu algoritmů. Zajišťuje, že model nejen dobře sedí na trénovacích datech, ale také je schopen efektivně předpovídat v reálných situacích. To je zásadní pro aplikace od datové vědy po AI automatizaci v chatbotech a jiných systémech.
Chyba zobecnění úzce souvisí s pojmy overfitting (přeučení) a underfitting (nedotrénování):
Matematicky je chyba zobecnění ( I[f] ) funkce ( f ) definována jako střední hodnota ztrátové funkce ( V ) přes společné rozdělení pravděpodobnosti vstupně-výstupních dvojic ( (x, y) ):
[ I[f] = \int_{X \times Y} V(f(\vec{x}), y) \rho(\vec{x}, y) d\vec{x} dy ]
Zde ( \rho(\vec{x}, y) ) je společné rozdělení pravděpodobnosti vstupů a výstupů, které je v praxi obvykle neznámé. Proto počítáme empirickou chybu (nebo empirické riziko) na základě vzorku dat:
[ I_n[f] = \frac{1}{n} \sum_{i=1}^{n} V(f(\vec{x}_i), y_i) ]
Algoritmus zobecňuje dobře, pokud rozdíl mezi chybou zobecnění a empirickou chybou konverguje k nule, když velikost vzorku ( n ) směřuje k nekonečnu.
Kompromis mezi zkreslením a rozptylem je klíčovým principem pro pochopení chyby zobecnění. Popisuje kompromis mezi dvěma typy chyb:
Cílem je najít rovnováhu, kdy jsou zkreslení i rozptyl minimální, čímž dosáhneme nízké chyby zobecnění. Tato rovnováha je zásadní pro vývoj přesných a robustních modelů.
K minimalizaci chyby zobecnění se používá několik technik:
V AI aplikacích, například chatbotech, je nízká chyba zobecnění zásadní, aby bot dokázal přesně reagovat na široké spektrum uživatelských dotazů. Pokud se chatbot přeučí na trénovací data, bude zvládat jen předdefinované dotazy a nezvládne efektivně reagovat na nové vstupy.
V datové vědě jsou modely s nízkou chybou zobecnění nezbytné pro predikce, které se dobře zobecňují na různých datových sadách. Například v prediktivní analytice musí model trénovaný na historických datech přesně předpovídat i budoucí trendy.
V učení s učitelem je cílem vytvořit funkci, která dokáže predikovat výstupní hodnoty pro každý vstupní údaj. Chyba zobecnění poskytuje vhled do toho, jak dobře bude tato funkce fungovat na nových datech, která nebyla v trénovací sadě.
Chyba zobecnění se používá k hodnocení výkonu učících algoritmů. Analýzou učících křivek, které zobrazují chyby na trénovacích i validačních datech v čase, lze posoudit, zda model inklinuje k overfittingu nebo underfittingu.
V teorii statistického učení je ohraničení rozdílu mezi chybou zobecnění a empirickou chybou ústřední otázkou. Používají se různé podmínky stability, například stabilita leave-one-out křížové validace, které dokazují, že algoritmus bude dobře zobecňovat.
Chyba zobecnění ve strojovém učení
Chyba zobecnění je zásadní pojem ve strojovém učení, představující rozdíl mezi chybovostí modelu na trénovacích datech a na neznámých datech. Odráží, jak dobře dokáže model předpovídat výsledky pro nová, dosud neviděná data.
Reference:
Some observations concerning Off Training Set (OTS) error od Jonathana Baxtera, publikováno 18. listopadu 2019, zkoumá formu chyby zobecnění označovanou jako Off Training Set (OTS) error. Práce diskutuje teorém, který naznačuje, že nízká trénovací chyba neznamená nutně nízkou OTS chybu, pokud nejsou splněny určité předpoklady o cílové funkci. Autor však tvrdí, že použitelnost tohoto teorému je omezená na modely, kde rozdělení trénovacích a testovacích dat se nepřekrývá, což v praxi často neplatí. Číst více
Stopping Criterion for Active Learning Based on Error Stability od Hideaki Ishibashiho a Hideitsu Hina, publikováno 9. dubna 2021, představuje kritérium zastavení pro aktivní učení založené na stabilitě chyby. Toto kritérium zajišťuje, že změna chyby zobecnění při přidání nových vzorků je omezena náklady na anotaci, což jej činí použitelným v jakémkoliv bayesovském rámci aktivního učení. Studie ukazuje, že navržené kritérium efektivně určuje optimální bod zastavení pro aktivní učení napříč různými modely a datovými sadami. Číst více
Chyba zobecnění označuje rozdíl mezi výkonem modelu na trénovacích datech a jeho schopností předpovídat výsledky pro neznámá data. Je to klíčová metrika pro hodnocení, jak dobře bude model fungovat v reálných situacích.
Techniky jako křížová validace, regularizace, pečlivý výběr modelu a ensemble metody pomáhají minimalizovat chybu zobecnění vyvážením zkreslení a rozptylu, což zlepšuje predikční výkon modelu na nových datech.
Porozumění a minimalizace chyby zobecnění zajišťuje, že modely AI a strojového učení fungují spolehlivě na nových, reálných datech, nejen na příkladech, na kterých byly natrénovány.
Kompromis mezi zkreslením a rozptylem popisuje rovnováhu mezi chybami způsobenými příliš zjednodušenými předpoklady modelu (zkreslení) a chybami způsobenými nadměrnou citlivostí na trénovací data (rozptyl). Najít správnou rovnováhu pomáhá minimalizovat chybu zobecnění.
Začněte vytvářet robustní AI modely s FlowHunt. Prozkoumejte intuitivní nástroje pro minimalizaci chyby zobecnění a maximalizaci přesnosti v reálných podmínkách.
Učení bez učitele je odvětvím strojového učení zaměřeným na hledání vzorů, struktur a vztahů v neoznačených datech, což umožňuje úlohy jako shlukování, redukci ...
Chyba učení v AI a strojovém učení je rozdíl mezi predikovanými a skutečnými výstupy modelu během tréninku. Je to klíčová metrika pro hodnocení výkonu modelu, a...
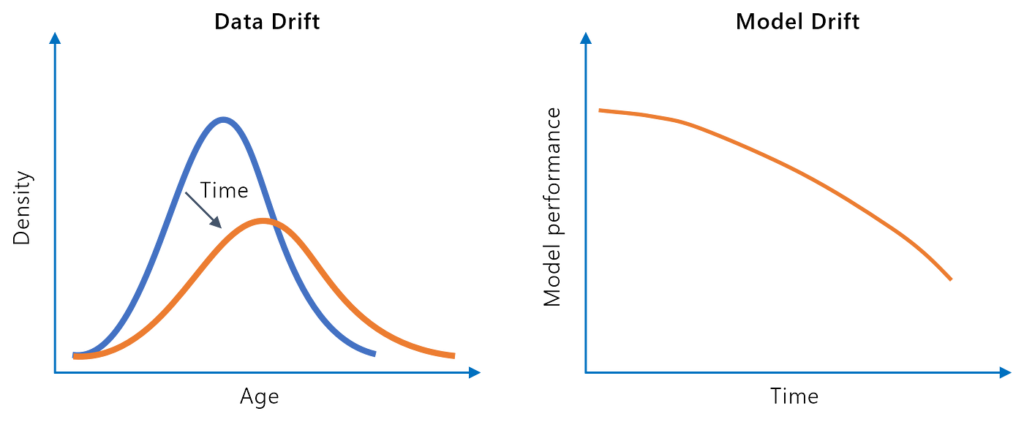
Odklon modelu, nebo také degradace modelu, označuje pokles prediktivní výkonnosti modelu strojového učení v čase v důsledku změn v reálném světě. Zjistěte, jaké...