Přesnost AI modelu a stabilita AI modelu
Objevte význam přesnosti a stability AI modelu ve strojovém učení. Zjistěte, jak tyto metriky ovlivňují aplikace jako detekce podvodů, lékařská diagnostika a ch...
6 min čtení
AI
Model Accuracy
+5
Střední průměrná přesnost (mAP) je komplexní metrika hodnotící schopnost modelů detekce objektů přesně rozpoznat a lokalizovat objekty na obrázcích.
Střední průměrná přesnost (mAP) je zásadní výkonnostní metrika v oblasti počítačového vidění, zejména při hodnocení modelů detekce objektů. Poskytuje jedinou číselnou hodnotu, která shrnuje schopnost modelu přesně detekovat a lokalizovat objekty v obrázcích. Na rozdíl od jednoduchých metrik přesnosti mAP zohledňuje jak správně rozpoznané objekty, tak přesnost jejich lokalizace, která se obvykle vyjadřuje pomocí predikce ohraničujících rámečků. Díky tomu je mAP komplexní metrikou pro úlohy vyžadující přesnou detekci i lokalizaci, například v autonomním řízení nebo bezpečnostních systémech.
Průměrná přesnost (AP):
Křivka přesnost-recall:
Překrytí (Intersection over Union, IoU):
Komponenty konfuzní matice:
Prahové hodnoty:
Pro výpočet mAP postupujte takto:
Generování predikcí:
Nastavení prahů IoU a skóre jistoty:
Hodnocení predikcí:
Výpočet přesnosti a recall:
Vykreslení křivky přesnost-recall:
Výpočet průměrné přesnosti (AP):
Výpočet mAP:
Hodnocení výkonu:
mAP se široce používá k hodnocení algoritmů detekce objektů, jako jsou Faster R-CNN, YOLO a SSD. Poskytuje komplexní měřítko vyvažující přesnost a recall, vhodné pro úlohy, kde je zásadní jak přesná detekce, tak lokalizace.
Benchmarking modelů:
mAP je standardní metrika v benchmarkových soutěžích jako PASCAL VOC, COCO a ImageNet, což umožňuje konzistentní porovnávání různých modelů a datových sad.
Autonomní vozidla:
Detekce objektů je klíčová pro rozpoznávání a lokalizaci chodců, vozidel či překážek. Vyšší skóre mAP značí spolehlivější systémy, které mohou zvýšit bezpečnost a navigaci autonomních vozidel.
Bezpečnostní systémy:
Přesná detekce objektů s vysokým mAP je důležitá pro bezpečnostní aplikace, které vyžadují monitoring a identifikaci konkrétních objektů či aktivit v reálném čase.
AI aplikace:
mAP slouží jako klíčová metrika při hodnocení AI modelů v automatizovaných systémech vyžadujících přesné rozpoznání objektů, například v robotickém vidění či AI kontrole kvality ve výrobě.
Chatboti a AI rozhraní:
Přestože se mAP přímo netýká chatbotů, jeho pochopení pomáhá při tvorbě AI systémů s vizuálními schopnostmi, což rozšiřuje jejich využití v interaktivních a automatizovaných prostředích.
Pro zlepšení mAP modelu zvažte následující strategie:
Kvalita dat:
Zajistěte kvalitní a dobře anotované trénovací datasety, které věrně reprezentují reálné scénáře. Kvalitní anotace přímo ovlivňují učení i hodnocení modelu.
Optimalizace algoritmu:
Zvolte nejmodernější architektury detekce objektů a dolaďujte hyperparametry pro zlepšení výkonu. Průběžné experimentování a validace jsou klíčové pro dosažení optimálních výsledků.
Proces anotace:
Používejte přesné a konzistentní postupy anotace pro zlepšení skutečných dat, což přímo ovlivňuje trénink i hodnocení modelu.
Výběr IoU a prahů:
Experimentujte s různými prahy IoU a skóre jistoty, abyste našli optimální rovnováhu pro vaši konkrétní aplikaci. Úprava těchto parametrů může zvýšit robustnost i přesnost modelu.
Díky správnému pochopení a využití mAP mohou odborníci vytvářet přesnější a spolehlivější systémy detekce objektů, což přispívá k pokroku v počítačovém vidění a příbuzných oblastech. Tato metrika je základním kamenem pro hodnocení efektivity modelů při identifikaci a lokalizaci objektů a posouvá inovace v oblastech, jako je autonomní navigace, bezpečnost a další.
Střední průměrná přesnost (MAP) je zásadní metrika pro hodnocení výkonu systémů vyhledávání informací i strojového učení. Níže uvádíme významné výzkumné příspěvky, které se detailně zabývají problematikou MAP, jejím výpočtem a aplikacemi v různých oblastech:
Efektivní výpočet COCO metriky přívětivý pro grafy pro hodnocení modelu během tréninku
Autoři: Luke Wood, Francois Chollet
Tento výzkum řeší výzvy při hodnocení COCO střední průměrné přesnosti (MAP) v rámci moderních frameworků hlubokého učení. Zdůrazňuje potřebu dynamického stavu pro výpočet MAP, závislost na globálních statistikách datové sady a řízení proměnlivého počtu ohraničujících rámečků. Studie navrhuje algoritmus pro MAP vhodný pro grafové struktury, umožňující hodnocení během trénování a lepší sledování metrik v průběhu tréninku modelu. Autoři poskytují přesný aproximační algoritmus, open-source implementaci a rozsáhlé numerické benchmarky pro ověření přesnosti metody. Přečtěte si celý článek zde
Fréchetovy průměry křivek pro průměrování signálů a aplikace na analýzu EKG dat
Autor: Jérémie Bigot
Studie zkoumá průměrování signálů, zejména ve vztahu k výpočtu průměrného tvaru z šumových signálů s geometrickou variabilitou. Práce zavádí použití Fréchetových průměrů křivek, které rozšiřují tradiční Eukleidovský průměr do neeukleidovských prostorů. Navržen je nový algoritmus pro průměrování signálů, který nevyžaduje referenční šablonu. Přístup je aplikován na odhad průměrných srdečních cyklů z EKG záznamů a ukazuje užitečnost pro přesnou synchronizaci a průměrování signálů. Přečtěte si celý článek zde
Střední hodnoty víceproměnných multiplikativních funkcí a aplikace
Autoři: D. Essouabri, C. Salinas Zavala, L. Tóth
Článek využívá vícerozměrné zeta funkce pro stanovení asymptotických vzorců pro průměry víceproměnných multiplikativních funkcí. Rozšiřuje aplikaci na pochopení průměrného počtu cyklických podskupin v určitých matematických skupinách a vícerozměrných průměrů spojených s funkcí nejmenšího společného násobku (NSN). Tento výzkum je významný pro zájemce o matematické aplikace MAP. Přečtěte si celý článek zde
Přesnější metody pro srovnání dopadu vědeckých citací na národní úrovni
Autoři: Ruth Fairclough, Mike Thelwall
Tento článek představuje metody analýzy dopadu citací vědeckých prací při zohlednění zkreslených rozdělení dat. Porovnává jednoduché průměry s geometrickými průměry a lineárním modelováním a doporučuje geometrické průměry pro menší vzorky. Výzkum se zaměřuje na identifikaci národních rozdílů v průměrném citačním dopadu, což je využitelné v politických analýzách i hodnocení akademického výkonu. Přečtěte si celý článek zde
Střední průměrná přesnost (mAP) je výkonnostní metrika sloužící k hodnocení modelů detekce objektů v počítačovém vidění. Měří, jak dobře model dokáže identifikovat a lokalizovat objekty, zohledňuje přesnost detekce i lokalizace.
mAP se vypočítá tak, že se pro každou třídu spočítá průměrná přesnost (AP) pomocí křivek přesnost-recall a prahů překrytí (IoU), a poté se průměrují hodnoty AP napříč všemi třídami.
mAP poskytuje komplexní hodnocení modelu detekce objektů, vyvažuje přesnost detekce i lokalizace, a je tak klíčová pro benchmarking a zlepšování AI systémů v aplikacích, jako jsou autonomní vozidla a dohledové systémy.
mAP se široce využívá při hodnocení modelů detekce objektů pro autonomní řízení, bezpečnostní systémy, AI v průmyslu a úlohy vyhledávání informací, jako je hledání dokumentů a obrázků.
Pro zlepšení mAP se zaměřte na kvalitní anotovaná data, optimalizaci detekčních algoritmů, doladění prahových hodnot modelu a zajištění robustních trénovacích a validačních postupů.
Objevte platformu FlowHunt pro návrh chytrých chatbotů a AI nástrojů. Propojujte intuitivní bloky a snadno automatizujte své nápady.
Objevte význam přesnosti a stability AI modelu ve strojovém učení. Zjistěte, jak tyto metriky ovlivňují aplikace jako detekce podvodů, lékařská diagnostika a ch...
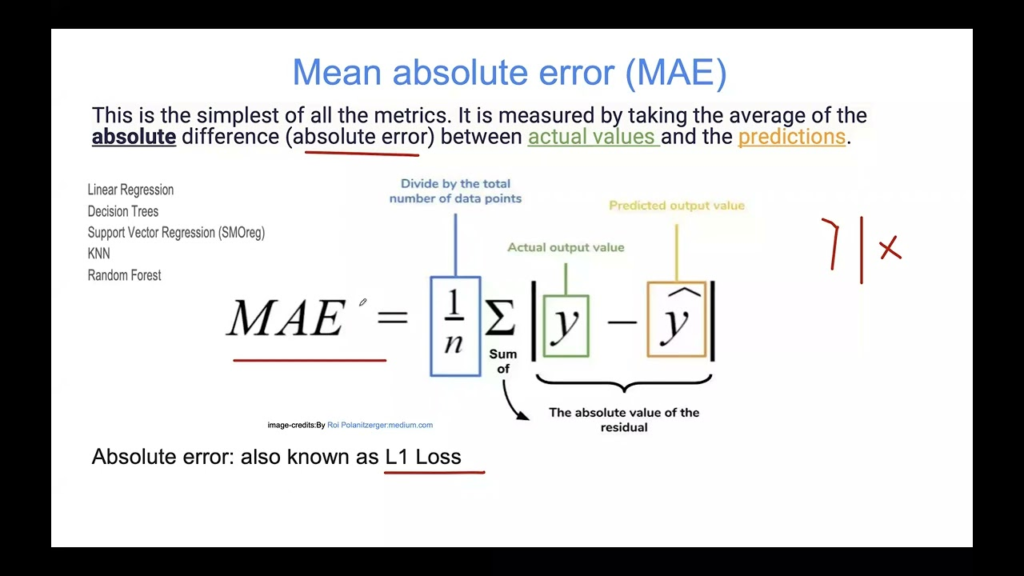
Střední absolutní chyba (MAE) je základní metrika ve strojovém učení pro hodnocení regresních modelů. Měří průměrnou velikost chyb v predikcích a poskytuje jedn...
Top-k přesnost je evaluační metrika strojového učení, která hodnotí, zda se skutečná třída nachází mezi top k předpovězenými třídami, a poskytuje tak komplexní ...