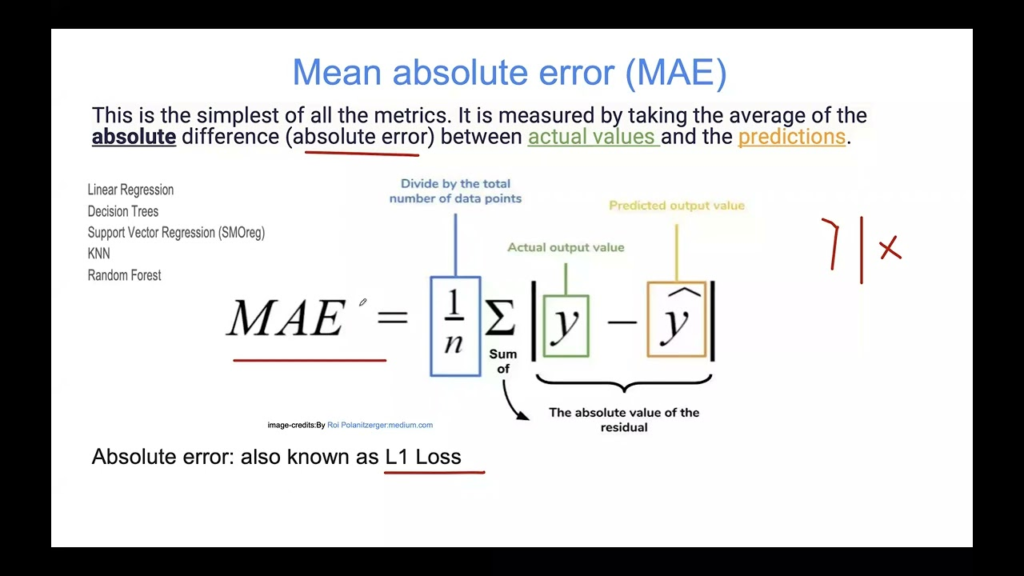
Keskimääräinen absoluuttivirhe (MAE)
Keskimääräinen absoluuttivirhe (MAE) on keskeinen metriikka koneoppimisessa regressiomallien arviointiin. Se mittaa ennusteiden virheiden keskimääräistä suuruut...
4 min lukuaika
MAE
Regression
+3
Mean Average Precision (mAP) on kattava mittari, jolla arvioidaan objektintunnistusmallien kykyä tunnistaa ja paikantaa kohteet kuvissa tarkasti.
Mean Average Precision (mAP) on olennainen suorituskykymittari tietokonenäön alalla, erityisesti objektintunnistusmallien arvioinnissa. Se tarjoaa yhden numeerisen arvon, joka tiivistää mallin kyvyn tunnistaa ja paikantaa objektit tarkasti kuvissa. Toisin kuin yksinkertaiset tarkkuusmittarit, mAP ottaa huomioon sekä oikein tunnistetut objektit että niiden paikannustarkkuuden, joka ilmaistaan tyypillisesti rajoittavien laatikoiden avulla. Tämä tekee siitä kattavan mittarin tehtäviin, joissa vaaditaan tarkkaa tunnistusta ja paikannusta, kuten autonomisessa ajamisessa ja valvontajärjestelmissä.
Average Precision (AP):
Precision-Recall-käyrä:
Intersection over Union (IoU):
Virhematriisin osat:
Kynnysarvot:
Laskettaessa mAP toimi seuraavasti:
Luo ennusteet:
Aseta IoU- ja luottamuskynnykset:
Arvioi ennusteet:
Laske tarkkuus ja herkkyys:
Piirrä precision-recall-käyrä:
Laske Average Precision (AP):
Laske mAP:
Suorituskyvyn arviointi:
mAP:ia käytetään laajasti objektintunnistusalgoritmien, kuten Faster R-CNN, YOLO ja SSD, arviointiin. Se tarjoaa kattavan mittarin, joka tasapainottaa tarkkuuden ja herkkyyden – tärkeää tehtävissä, joissa sekä tunnistuksen että paikannuksen tarkkuus ovat olennaisia.
Mallien vertailu:
mAP on standardimittari vertailukilpailuissa, kuten PASCAL VOC, COCO ja ImageNet, mahdollistaen johdonmukaisen vertailun eri mallien ja aineistojen välillä.
Autonomiset ajoneuvot:
Objektintunnistus on keskeistä jalankulkijoiden, ajoneuvojen ja esteiden tunnistamisessa ja paikantamisessa. Korkea mAP-arvo kertoo luotettavasta tunnistusjärjestelmästä, joka parantaa turvallisuutta ja navigointia.
Valvontajärjestelmät:
Tarkka objektintunnistus korkean mAP-arvon avulla on tärkeää turvallisuussovelluksissa, joissa tarvitaan reaaliaikaista kohteiden ja tapahtumien seurantaa.
Tekoälypohjaiset sovellukset:
mAP toimii kriittisenä mittarina tekoälymallien arvioinnissa automatisoiduissa järjestelmissä, joissa vaaditaan tarkkaa objektintunnistusta, kuten robottinäössä ja laadunvalvonnassa tuotannossa.
Chatbotit ja tekoälyrajapinnat:
Vaikka mAP ei suoraan sovellu chatbotteihin, sen ymmärtäminen auttaa kehittämään tekoälyjärjestelmiä, joissa yhdistyy visuaalinen havainnointi ja vuorovaikutus.
Mallin mAP-arvon nostamiseksi kannattaa huomioida seuraavat seikat:
Aineiston laatu:
Varmista korkealaatuiset, huolellisesti annotoidut opetusdatat, jotka heijastavat todellisia käyttötilanteita. Hyvät annotaatiot vaikuttavat suoraan mallin oppimiseen ja arviointiin.
Algoritmin optimointi:
Valitse viimeisimmät objektintunnistusrakenteet ja hienosäädä hyperparametreja parhaan suorituskyvyn saavuttamiseksi. Jatkuva kokeilu ja validointi ovat avainasemassa.
Annotointiprosessi:
Käytä tarkkoja ja yhdenmukaisia annotointikäytäntöjä, jotta maastototuusaineisto on laadukasta ja parantaa koulutusta sekä arviointia.
IoU- ja kynnysarvojen valinta:
Kokeile erilaisia IoU- ja luottamuskynnyksiä, jotta löydät sovellukseesi parhaiten sopivan tasapainon. Näiden parametrien säätäminen voi parantaa mallin luotettavuutta ja tarkkuutta.
Ymmärtämällä ja hyödyntämällä mAP:ia voidaan rakentaa tarkempia ja luotettavampia objektintunnistusjärjestelmiä, edistäen tietokonenäön ja siihen liittyvien alojen kehitystä. Tämä mittari on keskeinen malli tehokkuuden arvioinnissa ja paikannuksessa, vauhdittaen innovaatioita esimerkiksi autonomisessa navigoinnissa, turvallisuudessa ja muilla aloilla.
Mean Average Precision (MAP) on keskeinen mittari tiedonhakujärjestelmien ja koneoppimismallien suorituskyvyn arvioinnissa. Alla on muutamia merkittäviä tutkimuspanoksia, jotka käsittelevät MAP:in yksityiskohtia, laskentaa ja sovelluksia eri aloilla:
Efficient Graph-Friendly COCO Metric Computation for Train-Time Model Evaluation
Kirjoittajat: Luke Wood, Francois Chollet
Tämä tutkimus käsittelee COCO mean average precision (MAP) -mittarin laskennan haasteita nykyaikaisissa syväoppimisympäristöissä. Artikkelissa korostetaan dynaamisen tilan tarvetta MAP-laskennassa, riippuvuutta koko aineistotason tilastoista sekä vaihtelevien rajauslaatikoiden määrän hallintaa. Tutkimuksessa ehdotetaan graafiystävällistä algoritmia, joka mahdollistaa MAP-arvon laskemisen jo mallin koulutuksen aikana ja parantaa mittarien näkyvyyttä koulutusvaiheessa. Kirjoittajat tarjoavat tarkan approksimaatioalgoritmin, avoimen lähdekoodin toteutuksen ja perusteelliset numeeriset vertailut menetelmän tarkkuuden varmistamiseksi. Lue koko artikkeli täältä
Fréchet Means of Curves for Signal Averaging and Application to ECG Data Analysis
Kirjoittaja: Jérémie Bigot
Tässä tutkimuksessa tarkastellaan signaalien keskiarvostusta erityisesti tilanteissa, joissa signaalit ovat meluisia ja sisältävät geometrisia vaihteluita. Artikkelissa esitellään Fréchet-keskiarvon käyttö käyrien tapauksessa, mikä laajentaa perinteisen euklidisen keskiarvon ei-euklidisiin avaruuksiin. Uusi signaalien keskiarvostusalgoritmi ei vaadi referenssimallia. Menetelmää sovelletaan sydänsähkökäyrän (EKG) syklien keskiarvon arviointiin, osoittaen sen hyödyllisyyden tarkassa synkronoinnissa ja keskiarvostuksessa. Lue koko artikkeli täältä
Mean Values of Multivariable Multiplicative Functions and Applications
Kirjoittajat: D. Essouabri, C. Salinas Zavala, L. Tóth
Tässä artikkelissa käytetään useita zeta-funktioita monimuuttujaisten multiplikatiivisten funktioiden keskiarvojen asymptoottisten kaavojen johtamiseen. Sovellukset ulottuvat esimerkiksi tiettyjen matemaattisten ryhmien syklisten aliryhmien keskimääräisen määrän arviointiin sekä pienimmän yhteisen jaollisen (PYJ) funktioon liittyviin monimuuttujiin keskiarvoihin. Tämä tutkimus tarjoaa merkittävää tietoa MAP:n matemaattisista sovelluksista kiinnostuneille. Lue koko artikkeli täältä
More Precise Methods for National Research Citation Impact Comparisons
Kirjoittajat: Ruth Fairclough, Mike Thelwall
Tässä artikkelissa esitellään menetelmiä tutkimusjulkaisujen viittausvaikutusten analysointiin, huomioiden vinoutuneet jakaumat. Siinä verrataan yksinkertaisia keskiarvoja geometriseen keskiarvoon ja lineaariseen mallintamiseen, ja suositellaan geometrisia keskiarvoja pienille aineistoille. Tutkimus keskittyy tunnistamaan kansallisia eroja keskimääräisessä viittausvaikutuksessa, mikä on sovellettavissa esimerkiksi politiikan analyysiin ja akateemiseen suorituskykyvertailuun. Lue koko artikkeli täältä
Mean Average Precision (mAP) on suorituskykymittari, jolla arvioidaan tietokonenäön objektintunnistusmalleja. Se mittaa, kuinka hyvin malli kykenee tunnistamaan ja paikantamaan kohteita, huomioiden sekä tunnistustarkkuuden että paikannuksen tarkkuuden.
mAP lasketaan siten, että jokaiselle luokalle lasketaan Average Precision (AP) käyttäen precision-recall-käyriä ja Intersection over Union (IoU) -kynnysarvoja, minkä jälkeen AP-tulokset keskiarvoistetaan kaikille luokille.
mAP tarjoaa kattavan arvion objektintunnistusmallin suorituskyvystä, tasapainottaen sekä tunnistus- että paikannustarkkuuden. Siksi se on keskeinen mittari tekoälyjärjestelmien vertailussa ja kehittämisessä esimerkiksi autonomisissa ajoneuvoissa ja valvonnassa.
mAP:ia käytetään laajasti objektintunnistusmallien arvioinnissa, esimerkiksi autonomisessa ajamisessa, valvontajärjestelmissä, tekoälypohjaisessa valmistuksessa sekä tiedonhaussa, kuten dokumenttien ja kuvien hakutehtävissä.
mAP:in parantamiseksi keskity korkealaatuisiin, huolellisesti annotoituihin aineistoihin, optimoi tunnistusalgoritmeja, hienosäädä mallin kynnysarvoja sekä varmista tehokkaat koulutus- ja validointikäytännöt.
Tutustu FlowHuntin alustaan älykkäiden chatbotien ja tekoälytyökalujen suunnitteluun. Yhdistä intuitiivisia lohkoja ja automatisoi ideasi helposti.
Keskimääräinen absoluuttivirhe (MAE) on keskeinen metriikka koneoppimisessa regressiomallien arviointiin. Se mittaa ennusteiden virheiden keskimääräistä suuruut...
Käyrän alle jäävä pinta-ala (AUC) on koneoppimisessa keskeinen mittari, jolla arvioidaan binääriluokittelumallien suorituskykyä. Se mittaa mallin kokonaiskykyä ...
Opi, miksi AI-mallin tarkkuus ja vakaus ovat tärkeitä koneoppimisessa. Tutustu siihen, miten nämä mittarit vaikuttavat sovelluksiin kuten petosten tunnistukseen...
