Underfitting
L'underfitting si verifica quando un modello di machine learning è troppo semplice per catturare le tendenze sottostanti dei dati su cui è stato addestrato. Que...
6 min di lettura
AI
Machine Learning
+3
L’errore di generalizzazione è una misura chiave nell’apprendimento automatico, quantificando la capacità di un modello di prevedere risultati su dati non visti e garantendo prestazioni robuste nel mondo reale.
L’errore di generalizzazione, spesso chiamato anche errore fuori campione o rischio, è un concetto fondamentale nell’apprendimento automatico e nella teoria dell’apprendimento statistico. Esso quantifica quanto bene un modello o algoritmo può prevedere risultati su dati non visti, sulla base dell’addestramento effettuato su un insieme finito di dati. L’obiettivo principale della valutazione dell’errore di generalizzazione è comprendere la capacità di un modello di funzionare bene su nuovi dati, non semplicemente su quelli su cui è stato addestrato. Questo concetto è cruciale per sviluppare modelli che siano sia accurati che robusti nelle applicazioni reali.
Alla base, l’errore di generalizzazione è la discrepanza tra le previsioni di un modello e i risultati reali su nuovi dati. Questo errore deriva da molteplici fonti, inclusi errori di modellizzazione, errori di campionamento e rumore intrinseco nei dati. Mentre alcuni di questi errori possono essere ridotti tramite tecniche come la selezione del modello e l’ottimizzazione dei parametri, altri, come il rumore, sono irriducibili.
Nei contesti di apprendimento supervisionato, l’errore di generalizzazione è una metrica fondamentale per valutare le prestazioni degli algoritmi. Assicura che un modello non solo si adatti ai dati su cui è stato addestrato, ma sia anche efficace nel fare previsioni in situazioni reali. Questo è vitale per applicazioni che vanno dalla data science all’automazione basata su IA in chatbot e altri sistemi intelligenti.
L’errore di generalizzazione è strettamente legato ai concetti di overfitting e underfitting:
Matematicamente, l’errore di generalizzazione ( I[f] ) di una funzione ( f ) è definito come il valore atteso di una funzione di perdita ( V ) sulla distribuzione congiunta delle coppie input-output ( (x, y) ):
[ I[f] = \int_{X \times Y} V(f(\vec{x}), y) \rho(\vec{x}, y) d\vec{x} dy ]
Qui, ( \rho(\vec{x}, y) ) è la distribuzione congiunta delle variabili di input e output, che in pratica è generalmente sconosciuta. Invece, si calcola l’errore empirico (o rischio empirico) basato sui dati campionati:
[ I_n[f] = \frac{1}{n} \sum_{i=1}^{n} V(f(\vec{x}_i), y_i) ]
Un algoritmo si dice che generalizza bene se la differenza tra l’errore di generalizzazione e l’errore empirico tende a zero quando la dimensione del campione ( n ) tende all’infinito.
Il compromesso bias-varianza è un principio chiave per comprendere l’errore di generalizzazione. Descrive il bilanciamento tra due tipi di errore:
L’obiettivo è trovare un equilibrio in cui sia bias che varianza siano minimizzati, raggiungendo così un basso errore di generalizzazione. Questo equilibrio è fondamentale per sviluppare modelli accurati e robusti.
Esistono diverse tecniche per ridurre l’errore di generalizzazione:
Nelle applicazioni di IA, come i chatbot, garantire un basso errore di generalizzazione è cruciale affinché il bot risponda correttamente a una vasta gamma di richieste degli utenti. Se un modello di chatbot si adatta troppo ai dati di addestramento, potrebbe funzionare bene solo su domande predefinite ma fallire su nuovi input.
Nella data science, modelli con basso errore di generalizzazione sono essenziali per fare previsioni che si adattino bene a diversi dataset. Ad esempio, nell’analisi predittiva, un modello addestrato su dati storici deve essere in grado di prevedere accuratamente le tendenze future.
Nell’apprendimento supervisionato, l’obiettivo è sviluppare una funzione che possa prevedere i valori di output per ogni input. L’errore di generalizzazione fornisce indicazioni su quanto bene questa funzione funzionerà su nuovi dati non presenti nell’addestramento.
L’errore di generalizzazione viene utilizzato per valutare le prestazioni degli algoritmi di apprendimento. Analizzando le learning curve, che tracciano errori di addestramento e validazione nel tempo, è possibile valutare se un modello rischia di overfittare o underfittare.
Nella teoria dell’apprendimento statistico, limitare la differenza tra errore di generalizzazione ed errore empirico è una preoccupazione centrale. Diverse condizioni di stabilità, come la leave-one-out cross-validation stability, sono utilizzate per dimostrare che un algoritmo generalizzerà bene.
Errore di Generalizzazione nell’Apprendimento Automatico
L’errore di generalizzazione è un concetto fondamentale nell’apprendimento automatico, rappresentando la differenza tra il tasso di errore di un modello sui dati di addestramento e quello su dati non visti. Riflette quanto bene un modello possa prevedere risultati su nuovi esempi.
Riferimenti:
Some observations concerning Off Training Set (OTS) error di Jonathan Baxter, pubblicato il 18 novembre 2019, esplora una forma di errore di generalizzazione nota come Off Training Set (OTS) error. Il documento discute un teorema che indica che un basso errore sul training set non implica necessariamente un basso OTS error a meno che non si facciano certe assunzioni sulla funzione target. Tuttavia, l’autore sostiene che l’applicabilità del teorema è limitata ai modelli in cui la distribuzione dei dati di addestramento non si sovrappone a quella dei dati di test, cosa che spesso non si verifica nella pratica dell’apprendimento automatico. Leggi di più
Stopping Criterion for Active Learning Based on Error Stability di Hideaki Ishibashi e Hideitsu Hino, pubblicato il 9 aprile 2021, introduce un criterio di arresto per l’apprendimento attivo basato sulla stabilità dell’errore. Questo criterio assicura che il cambiamento nell’errore di generalizzazione, aggiungendo nuovi campioni, sia limitato dal costo di annotazione, rendendolo applicabile a qualsiasi framework bayesiano di active learning. Lo studio dimostra che il criterio proposto determina efficacemente il punto di arresto ottimale per l’apprendimento attivo su vari modelli e dataset. Leggi di più
L'errore di generalizzazione si riferisce alla differenza tra le prestazioni di un modello sui dati di addestramento e la sua capacità di prevedere risultati su dati non visti. È una metrica fondamentale per valutare quanto bene un modello si comporterà in scenari reali.
Tecniche come la cross-validation, la regolarizzazione, una selezione accurata del modello e i metodi ensemble aiutano a minimizzare l'errore di generalizzazione bilanciando bias e varianza, migliorando così le prestazioni predittive su nuovi dati.
Comprendere e minimizzare l'errore di generalizzazione assicura che i modelli di IA e di apprendimento automatico funzionino in modo affidabile su nuovi dati reali, e non solo sugli esempi su cui sono stati addestrati.
Il compromesso bias-varianza descrive l'equilibrio tra errori dovuti ad assunzioni di modellizzazione troppo semplicistiche (bias) ed errori dovuti a eccessiva sensibilità ai dati di addestramento (varianza). Raggiungere il giusto equilibrio aiuta a minimizzare l'errore di generalizzazione.
Inizia a costruire modelli di IA robusti con FlowHunt. Esplora strumenti intuitivi per ridurre l'errore di generalizzazione e massimizzare l'accuratezza nel mondo reale.
L'underfitting si verifica quando un modello di machine learning è troppo semplice per catturare le tendenze sottostanti dei dati su cui è stato addestrato. Que...
L'overfitting è un concetto fondamentale nell'intelligenza artificiale (IA) e nel machine learning (ML), che si verifica quando un modello apprende troppo bene ...
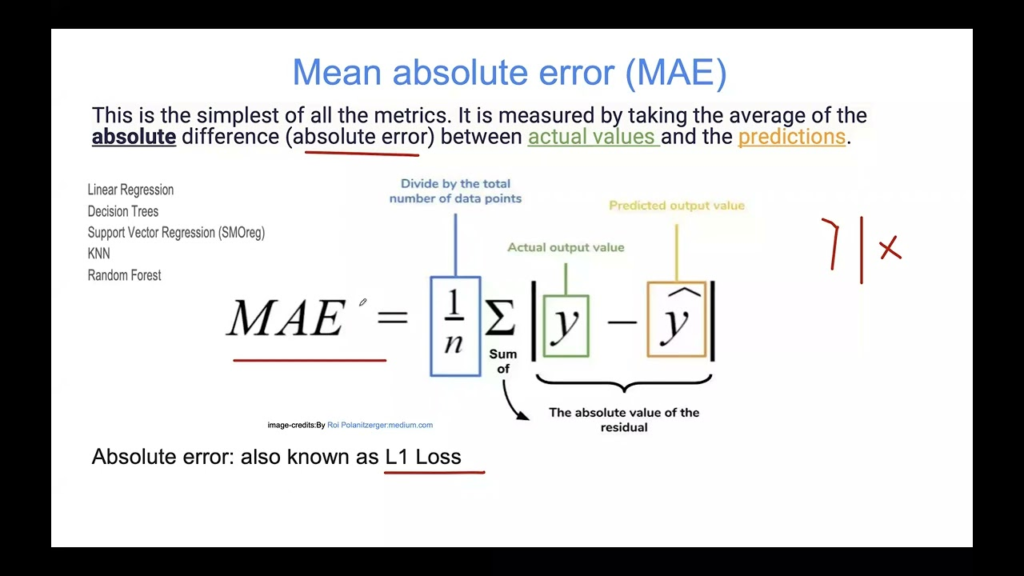
L'Errore Assoluto Medio (MAE) è una metrica fondamentale nel machine learning per valutare i modelli di regressione. Misura la grandezza media degli errori nell...