Treningsfeil
Treningsfeil i AI og maskinlæring er avviket mellom en modells predikerte og faktiske utganger under trening. Det er en nøkkelindikator for å evaluere modellens...
7 min lesing
AI
Machine Learning
+3
Generaliseringsfeil er et sentralt mål i maskinlæring og kvantifiserer en modells evne til å forutsi utfall for ukjente data og sikre robust ytelse i virkelige situasjoner.
Generaliseringsfeil, ofte referert til som feil utenfor utvalget eller risiko, er et grunnleggende konsept innen maskinlæring og statistisk læringsteori. Det kvantifiserer hvor godt en modell eller algoritme kan forutsi utfall for ukjente data, basert på sin trening fra et begrenset datasett. Hovedmålet med å vurdere generaliseringsfeil er å forstå en modells evne til å prestere godt på nye, tidligere ukjente data, og ikke bare dataene den ble trent på. Dette konseptet er avgjørende for å utvikle modeller som både er nøyaktige og robuste i virkelige applikasjoner.
I sin kjerne er generaliseringsfeil avviket mellom en modells prediksjoner og de faktiske utfallene på nye data. Denne feilen oppstår fra flere kilder, inkludert modellunøyaktigheter, utvalgsfeil og iboende støy i dataene. Mens noen av disse feilene kan minimeres gjennom teknikker som modellvalg og parameterjustering, er andre, som støy, irreducerbare.
I sammenhenger med overvåket læring fungerer generaliseringsfeil som et kritisk mål for å evaluere algoritmers ytelse. Det sikrer at en modell ikke bare tilpasser seg dataene den ble trent på, men også effektivt kan brukes til å gjøre prediksjoner i virkelige scenarier. Dette er avgjørende for applikasjoner fra data science til AI-drevet automatisering i chatboter og andre AI-systemer.
Generaliseringsfeil er nært knyttet til begrepene overtilpasning og undertilpasning:
Matematisk er generaliseringsfeilen ( I[f] ) til en funksjon ( f ) definert som forventningsverdien til en tapfunksjon ( V ) over den felles sannsynlighetsfordelingen til input-output-par ( (x, y) ):
[ I[f] = \int_{X \times Y} V(f(\vec{x}), y) \rho(\vec{x}, y) d\vec{x} dy ]
Her er ( \rho(\vec{x}, y) ) den felles sannsynlighetsfordelingen til input og output, som vanligvis er ukjent i praksis. I stedet beregner vi den empiriske feilen (eller empirisk risiko) basert på utvalgsdata:
[ I_n[f] = \frac{1}{n} \sum_{i=1}^{n} V(f(\vec{x}_i), y_i) ]
En algoritme sies å generalisere godt hvis forskjellen mellom generaliseringsfeil og empirisk feil nærmer seg null når utvalgsstørrelsen ( n ) går mot uendelig.
Skjevhet-varians-kompromisset er et sentralt prinsipp for å forstå generaliseringsfeil. Det beskriver kompromisset mellom to typer feil:
Målet er å finne en balanse hvor både skjevhet og varians minimeres, slik at generaliseringsfeilen blir lav. Denne balansen er avgjørende for å utvikle modeller som både er nøyaktige og robuste.
Flere teknikker brukes for å minimere generaliseringsfeil:
I AI-applikasjoner, som chatboter, er det avgjørende med lav generaliseringsfeil for at boten skal kunne svare nøyaktig på et bredt spekter av brukerhenvendelser. Hvis en chatbot-modell overtilpasser seg treningsdataene, vil den kanskje bare prestere godt på forhåndsdefinerte spørsmål, men ikke kunne håndtere nye brukerinnspill effektivt.
I data science er modeller med lav generaliseringsfeil essensielle for å gjøre prediksjoner som generaliserer godt på tvers av ulike datasett. For eksempel må en modell trent på historiske data kunne forutsi fremtidige trender nøyaktig i prediktiv analyse.
I overvåket læring er målet å utvikle en funksjon som kan forutsi utgangsverdier for hver inputdata. Generaliseringsfeilen gir innsikt i hvor godt denne funksjonen vil prestere når den brukes på nye data som ikke er med i treningssettet.
Generaliseringsfeil brukes til å evaluere ytelsen til læringsalgoritmer. Ved å analysere læringskurver, som viser trenings- og valideringsfeil over tid, kan man vurdere om en modell sannsynligvis vil over- eller undertilpasse.
I statistisk læringsteori er det sentralt å binde forskjellen mellom generaliseringsfeil og empirisk feil. Ulike stabilitetsbetingelser, som leave-one-out-kryssvalideringsstabilitet, brukes for å bevise at en algoritme vil generalisere godt.
Generaliseringsfeil i maskinlæring
Generaliseringsfeil er et kritisk begrep i maskinlæring og representerer forskjellen mellom feilraten til en modell på treningsdata versus ukjente data. Det reflekterer hvor godt en modell kan forutsi utfall for nye, ukjente eksempler.
Referanser:
Some observations concerning Off Training Set (OTS) error av Jonathan Baxter, publisert 18. november 2019, utforsker en form for generaliseringsfeil kjent som Off Training Set (OTS) error. Artikkelen diskuterer et teorem som indikerer at lav treningssettfeil ikke nødvendigvis gir lav OTS-feil med mindre visse antakelser er gjort om målfunksjonen. Forfatteren hevder imidlertid at teoremet kun gjelder for modeller der trenings- og testdatadistribusjonen ikke overlapper, noe som ofte ikke er tilfellet i praktisk maskinlæring. Les mer
Stopping Criterion for Active Learning Based on Error Stability av Hideaki Ishibashi og Hideitsu Hino, publisert 9. april 2021, introduserer et stoppkriterium for aktiv læring basert på feilstabilitet. Dette kriteriet sikrer at endringen i generaliseringsfeil ved å legge til nye prøver er begrenset av annoteringskostnaden, noe som gjør det anvendelig for alle bayesiske rammeverk for aktiv læring. Studien viser at det foreslåtte kriteriet effektivt bestemmer det optimale stoppunktet for aktiv læring på tvers av ulike modeller og datasett. Les mer
Generaliseringsfeil viser til forskjellen mellom en modells ytelse på treningsdata og dens evne til å forutsi utfall for ukjente data. Det er et kritisk mål for å evaluere hvor godt en modell vil prestere i virkelige situasjoner.
Teknikker som kryssvalidering, regularisering, nøye modellvalg og ensemblemetoder bidrar til å minimere generaliseringsfeil ved å balansere skjevhet og varians, og dermed forbedre en modells prediktive ytelse på nye data.
Å forstå og minimere generaliseringsfeil sikrer at AI- og maskinlæringsmodeller presterer pålitelig på nye, virkelige data, ikke bare på eksemplene de ble trent på.
Skjevhet-varians-kompromisset beskriver balansen mellom feil som skyldes for enkle modellantakelser (skjevhet) og feil som skyldes overdreven følsomhet for treningsdata (varians). Å oppnå riktig balanse bidrar til å minimere generaliseringsfeil.
Begynn å bygge robuste AI-modeller med FlowHunt. Utforsk intuitive verktøy for å minimere generaliseringsfeil og maksimere nøyaktigheten i virkelige situasjoner.
Treningsfeil i AI og maskinlæring er avviket mellom en modells predikerte og faktiske utganger under trening. Det er en nøkkelindikator for å evaluere modellens...
Underfitting oppstår når en maskinlæringsmodell er for enkel til å fange opp de underliggende trendene i dataene den er trent på. Dette fører til dårlig ytelse ...
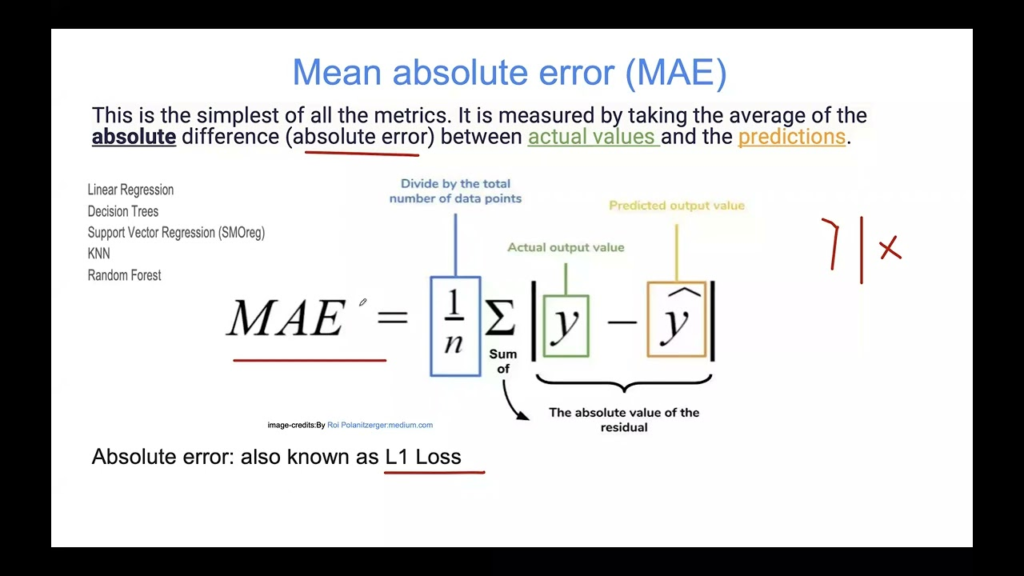
Gjennomsnittlig absolutt feil (MAE) er en grunnleggende metrikk i maskinlæring for evaluering av regresjonsmodeller. Den måler den gjennomsnittlige størrelsen p...