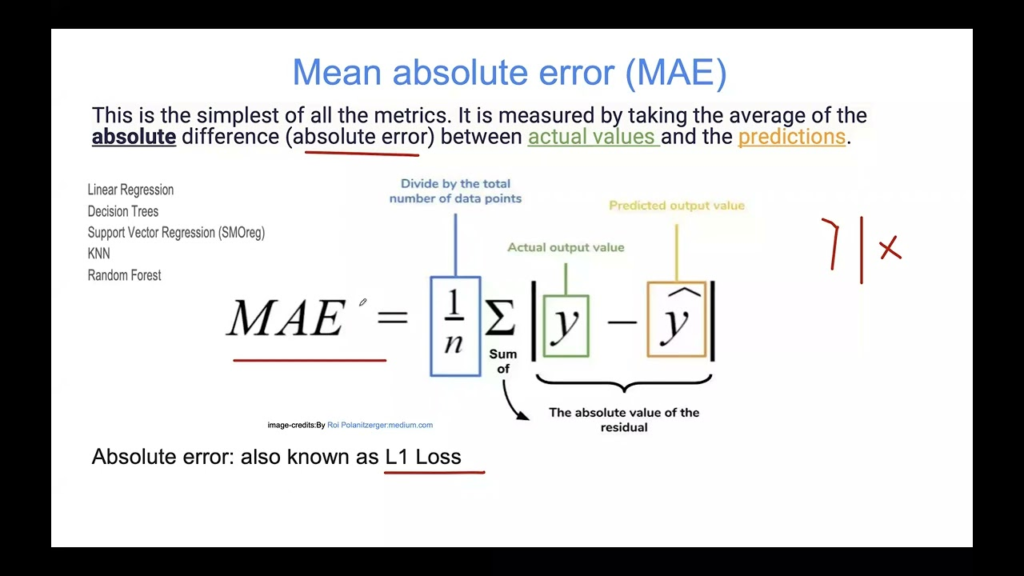
Gjennomsnittlig absolutt feil (MAE)
Gjennomsnittlig absolutt feil (MAE) er en grunnleggende metrikk i maskinlæring for evaluering av regresjonsmodeller. Den måler den gjennomsnittlige størrelsen p...
5 min lesing
MAE
Regression
+3
Gjennomsnittlig presisjon (mAP) er en omfattende målemetode som evaluerer objektdeteksjonsmodellers evne til å nøyaktig oppdage og lokalisere objekter i bilder.
Gjennomsnittlig presisjon (mAP) er en essensiell ytelsesmåler innen datamaskinsyn, særlig for evaluering av objektdeteksjonsmodeller. Den gir en enkel skalarverdi som oppsummerer en modells evne til å nøyaktig oppdage og lokalisere objekter i bilder. I motsetning til enkle nøyaktighetsmålinger vurderer mAP både korrekt identifiserte objekter og hvor presist de er lokalisert, vanligvis uttrykt gjennom predikerte avgrensningsbokser. Dette gjør mAP til en omfattende målemetode for oppgaver som krever presis deteksjon og lokalisering, som autonom kjøring og overvåkingssystemer.
Gjennomsnittlig presisjon (AP):
Presisjon-Recall-kurve:
Intersection over Union (IoU):
Komponenter i forvirringsmatrisen:
Terskler:
For å beregne mAP, følg disse stegene:
Generer prediksjoner:
Angi IoU- og konfidens-terskler:
Evaluer prediksjoner:
Beregne presisjon og recall:
Plot presisjon-recall-kurven:
Beregne gjennomsnittlig presisjon (AP):
Beregne mAP:
Ytelsesevaluering:
mAP brukes mye til å evaluere objektdeteksjonsalgoritmer som Faster R-CNN, YOLO og SSD. Det gir et helhetlig mål som balanserer presisjon og recall, og er ideelt for oppgaver der både deteksjonsnøyaktighet og lokaliseringspresisjon er kritisk.
Benchmarking av modeller:
mAP er en standardmålemetode i benchmark-utfordringer som PASCAL VOC, COCO og ImageNet, og muliggjør konsistent sammenligning på tvers av ulike modeller og datasett.
Autonome kjøretøy:
Objektdeteksjon er avgjørende for å identifisere og lokalisere fotgjengere, kjøretøy og hindringer. Høye mAP-verdier indikerer pålitelige objektdeteksjonssystemer som kan øke sikkerheten og navigasjonen i autonome kjøretøy.
Overvåkingssystemer:
Nøyaktig objektdeteksjon med høy mAP er viktig for sikkerhetsapplikasjoner som krever overvåking og identifisering av spesifikke objekter eller aktiviteter i sanntids videostrømmer.
KI-drevne applikasjoner:
mAP fungerer som en kritisk målemetode for evaluering av KI-modeller i automatiserte systemer som krever presis objektdeteksjon, som robotisk syn og KI-styrt kvalitetskontroll i produksjon.
Chatboter og KI-grensesnitt:
Selv om det ikke er direkte anvendelig på chatboter, kan forståelse av mAP hjelpe med å utvikle KI-systemer som integrerer visuelle persepsjonsevner og dermed øke nytteverdien i interaktive og automatiserte miljøer.
For å forbedre mAP-en til en modell, vurder følgende strategier:
Datakvalitet:
Sørg for høykvalitets og godt annoterte treningsdatasett som nøyaktig representerer virkelige scenarioer. Kvalitetsannotasjoner påvirker modellens læring og evaluering direkte.
Algoritmeoptimalisering:
Velg toppmoderne objektdeteksjonsarkitekturer og finjuster hyperparametere for å forbedre modellens ytelse. Kontinuerlig eksperimentering og validering er nøkkelen til optimale resultater.
Annoteringsprosess:
Bruk presise og konsistente annoteringsrutiner for å forbedre fasitdata, noe som direkte påvirker modellens trening og evaluering.
Valg av IoU og terskler:
Eksperimenter med ulike IoU- og konfidens-terskler for å finne den optimale balansen for din spesifikke applikasjon. Justering av disse parameterne kan forbedre modellens robusthet og nøyaktighet.
Ved å forstå og utnytte mAP kan fagfolk bygge mer nøyaktige og pålitelige objektdeteksjonssystemer, og bidra til fremskritt innen datamaskinsyn og relaterte felt. Denne målemetoden er en hjørnestein for å evaluere modellers effektivitet i å identifisere og lokalisere objekter, og driver innovasjon innen områder som autonom navigasjon, sikkerhet og mer.
Gjennomsnittlig presisjon (MAP) er en avgjørende målemetode for å evaluere ytelsen til informasjonsgjenfinningssystemer og maskinlæringsmodeller. Nedenfor presenteres noen viktige forskningsbidrag som tar for seg detaljene rundt MAP, dens beregning og anvendelser på tvers av ulike domener:
Effektiv grafvennlig beregning av COCO-målemetode for evaluering av modeller under trening
Forfattere: Luke Wood, Francois Chollet
Denne forskningen tar for seg utfordringene ved å evaluere COCO gjennomsnittlig presisjon (MAP) i moderne dyp læringsrammeverk. Den fremhever behovet for en dynamisk tilstand for å beregne MAP, avhengighet av globale datasettstatistikker, og håndtering av varierende antall avgrensningsbokser. Artikkelen foreslår en grafvennlig algoritme for MAP, som muliggjør evaluering under trening og forbedrer synligheten av målemetoder mens modellen trenes. Forfatterne presenterer en nøyaktig tilnærmingsalgoritme, en åpen kildekode-implementasjon og omfattende numeriske tester for å sikre nøyaktigheten til metoden. Les hele artikkelen her
Fréchet-gjennomsnitt av kurver for signalgjennomsnitt og anvendelse på EKG-dataanalyse
Forfatter: Jérémie Bigot
Denne studien utforsker signalgjennomsnitt, spesielt i forbindelse med å beregne en gjennomsnittlig form fra støyende signaler med geometrisk variasjon. Artikkelen introduserer bruk av Fréchet-gjennomsnitt av kurver, som utvider det tradisjonelle euklidske gjennomsnittet til ikke-euklidske rom. En ny algoritme for signalgjennomsnitt foreslås, som ikke krever en referansemal. Tilnærmingen brukes til å estimere gjennomsnittlige hjerteintervaller fra EKG-opptak, og demonstrerer nytten for presis signal-synkronisering og gjennomsnittsdannelse. Les hele artikkelen her
Gjennomsnittsverdier av multivariable multiplikative funksjoner og anvendelser
Forfattere: D. Essouabri, C. Salinas Zavala, L. Tóth
Artikkelen benytter flere zeta-funksjoner for å etablere asymptotiske formler for gjennomsnitt av multivariable multiplikative funksjoner. Den utvider anvendelsen til å forstå gjennomsnittlig antall sykliske undergrupper i visse matematiske grupper og multivariable gjennomsnitt knyttet til minste felles multiplum (LCM)-funksjonen. Denne forskningen er betydelig for de som er interessert i matematiske anvendelser av MAP. Les hele artikkelen her
Mer presise metoder for nasjonale sammenligninger av forskningssitasjonseffekt
Forfattere: Ruth Fairclough, Mike Thelwall
Denne artikkelen introduserer metoder for å analysere forskningsartiklers siteringspåvirkning, justert for skjevfordelte datasett. Den sammenligner enkle gjennomsnitt med geometriske gjennomsnitt og lineær modellering, og anbefaler geometriske gjennomsnitt for mindre utvalg. Forskningen fokuserer på å identifisere nasjonale forskjeller i gjennomsnittlig siteringspåvirkning, anvendbart i policyanalyse og akademisk benchmarking. Les hele artikkelen her
Gjennomsnittlig presisjon (mAP) er en ytelsesmåler som evaluerer objektdeteksjonsmodeller innen datamaskinsyn. Den måler hvor godt en modell kan identifisere og lokalisere objekter, og vurderer både deteksjonsnøyaktighet og presisjonen til objektlokalisering.
mAP beregnes ved å kalkulere gjennomsnittlig presisjon (AP) for hver klasse ved hjelp av presisjon-recall-kurver og IoU-terskler, og deretter ta gjennomsnittet av AP-scorene på tvers av alle klasser.
mAP gir en helhetlig vurdering av en objektdeteksjonsmodell ved å balansere både deteksjons- og lokaliseringsnøyaktighet. Dette gjør den essensiell for benchmarking og forbedring av KI-systemer i applikasjoner som autonome kjøretøy og overvåkning.
mAP brukes mye til å evaluere objektdeteksjonsmodeller for autonom kjøring, overvåkingssystemer, KI-drevet produksjon og informasjonsgjenfinning som dokument- og bildesøk.
For å forbedre mAP, fokuser på høykvalitets annoterte datasett, optimaliser deteksjonsalgoritmer, finjuster modellterskler og sørg for robuste trenings- og valideringsrutiner.
Oppdag FlowHunt sin plattform for å designe smarte chatboter og KI-verktøy. Koble sammen intuitive blokker og automatiser dine ideer enkelt.
Gjennomsnittlig absolutt feil (MAE) er en grunnleggende metrikk i maskinlæring for evaluering av regresjonsmodeller. Den måler den gjennomsnittlige størrelsen p...
Oppdag viktigheten av nøyaktighet og stabilitet i AI-modeller innen maskinlæring. Lær hvordan disse målene påvirker applikasjoner som svindeldeteksjon, medisins...
Top-k nøyaktighet er en evalueringsmetode innen maskinlæring som vurderer om den sanne klassen er blant de k beste predikerte klassene, og gir et helhetlig og t...
