Träningsfel
Träningsfel inom AI och maskininlärning är skillnaden mellan en modells förutsagda och faktiska utdata under träningen. Det är en nyckelmetrik för att utvärdera...
7 min läsning
AI
Machine Learning
+3
Generaliseringsfel är ett nyckelmått inom maskininlärning som kvantifierar en modells förmåga att förutse utfall för okänd data och säkerställer robust prestanda i verkliga tillämpningar.
Generaliseringsfel, ofta kallat utanför-provet-fel eller risk, är ett grundläggande begrepp inom maskininlärning och statistisk inlärningsteori. Det kvantifierar hur väl en modell eller algoritm kan förutspå utfall för osedda data, baserat på träning från ett ändligt urval datamängd. Huvudsyftet med att bedöma generaliseringsfel är att förstå en modells förmåga att prestera väl på ny, tidigare osedd data, snarare än bara på den data den tränats på. Detta begrepp är avgörande för att utveckla modeller som är både exakta och robusta i verkliga tillämpningar.
I grunden är generaliseringsfel skillnaden mellan en modells förutsägelser och de faktiska utfallen på ny data. Detta fel uppstår från flera källor, inklusive modellfel, urvalsfel och inneboende brus i datan. Medan vissa av dessa fel kan minskas genom tekniker som modellval och parameterjustering, är andra, såsom brus, irreducerbara.
I övervakad inlärning fungerar generaliseringsfel som ett avgörande mått för att utvärdera algoritmers prestanda. Det säkerställer att en modell inte bara anpassar sig till datan den tränades på utan även effektivt kan användas för att göra förutsägelser i verkliga scenarier. Detta är avgörande för allt från datavetenskap till AI-driven automatisering i chattbottar och andra AI-system.
Generaliseringsfel är nära kopplat till begreppen överanpassning och underanpassning:
Matematiskt definieras generaliseringsfelet ( I[f] ) för en funktion ( f ) som det förväntade värdet av en förlustfunktion ( V ) över den gemensamma sannolikhetsfördelningen för in- och utdata-par ( (x, y) ):
[ I[f] = \int_{X \times Y} V(f(\vec{x}), y) \rho(\vec{x}, y) d\vec{x} dy ]
Här är ( \rho(\vec{x}, y) ) den gemensamma sannolikhetsfördelningen för indata och utdata, som vanligtvis är okänd i praktiken. Istället beräknar vi det empiriska felet (eller empirisk risk) baserat på urvalsdatan:
[ I_n[f] = \frac{1}{n} \sum_{i=1}^{n} V(f(\vec{x}_i), y_i) ]
En algoritm sägs generalisera väl om skillnaden mellan generaliseringsfelet och det empiriska felet närmar sig noll när urvalsstorleken ( n ) går mot oändligheten.
Bias-varianskompromissen är en grundläggande princip för att förstå generaliseringsfel. Den beskriver avvägningen mellan två typer av fel:
Målet är att hitta en balans där både bias och varians minimeras, vilket ger ett lågt generaliseringsfel. Denna balans är avgörande för att utveckla modeller som är både exakta och robusta.
Flera tekniker används för att minimera generaliseringsfel:
Inom AI-applikationer, såsom chattbottar, är det avgörande att säkerställa lågt generaliseringsfel för att boten ska kunna svara korrekt på ett brett spektrum av användarfrågor. Om en chattbotmodell överanpassar träningsdatan kanske den bara presterar bra på fördefinierade frågor men misslyckas att hantera nya användarinmatningar effektivt.
Inom datavetenskap är modeller med lågt generaliseringsfel viktiga för att kunna göra förutsägelser som generaliserar bra över olika datamängder. Exempelvis, i prediktiv analys måste en modell som tränats på historiska data kunna förutse framtida trender korrekt.
I övervakad inlärning är målet att utveckla en funktion som kan förutse utvärden för varje indata. Generaliseringsfelet ger en inblick i hur väl denna funktion kommer att prestera när den appliceras på ny data som inte finns med i träningsmängden.
Generaliseringsfel används för att utvärdera inlärningsalgoritmers prestanda. Genom att analysera inlärningskurvor, som visar tränings- och valideringsfel över tid, kan man avgöra om en modell sannolikt överanpassar eller underanpassar.
Inom statistisk inlärningsteori är det centralt att begränsa skillnaden mellan generaliseringsfel och empiriskt fel. Olika stabilitetsvillkor, såsom leave-one-out-korsvalideringsstabilitet, används för att visa att en algoritm kommer att generalisera väl.
Generaliseringsfel inom maskininlärning
Generaliseringsfel är ett kritiskt begrepp inom maskininlärning och representerar skillnaden mellan en modells felfrekvens på träningsdata och på osedda data. Det speglar hur väl en modell kan förutsäga utfall för nya, okända exempel.
Referenser:
Some observations concerning Off Training Set (OTS) error av Jonathan Baxter, publicerad den 18 november 2019, undersöker en form av generaliseringsfel som kallas Off Training Set (OTS) error. Artikeln diskuterar en sats som indikerar att ett litet träningssetfel inte nödvändigtvis innebär ett litet OTS-fel om inte vissa antaganden görs om mål-funktionen. Författaren hävdar dock att satsens tillämplighet är begränsad till modeller där träningsdatans fördelning inte överlappar med testdatans fördelning, vilket ofta inte är fallet i praktisk maskininlärning. Läs mer
Stopping Criterion for Active Learning Based on Error Stability av Hideaki Ishibashi och Hideitsu Hino, publicerad den 9 april 2021, introducerar ett stoppkriterium för aktiv inlärning baserat på felstabilitet. Detta kriterium säkerställer att förändringen i generaliseringsfel vid tillägg av nya prover är begränsad av annoteringskostnaden, vilket gör det tillämpligt för alla Bayesianska aktiva inlärningsramverk. Studien visar att det föreslagna kriteriet effektivt avgör den optimala stoppunkten för aktiv inlärning över olika modeller och datamängder. Läs mer
Generaliseringsfel syftar på skillnaden mellan en modells prestanda på träningsdata och dess förmåga att förutse utfall för osedda data. Det är ett avgörande mått för att utvärdera hur väl en modell kommer att prestera i verkliga scenarier.
Tekniker såsom korsvalidering, regularisering, noggrant modellval och ensemblemetoder hjälper till att minimera generaliseringsfel genom att balansera bias och varians, vilket förbättrar en modells prediktiva prestanda på ny data.
Att förstå och minimera generaliseringsfel säkerställer att AI- och maskininlärningsmodeller presterar tillförlitligt på ny, verklig data, inte bara på de exempel de tränats på.
Bias-varianskompromissen beskriver balansen mellan fel som beror på alltför enkla modellantaganden (bias) och fel som beror på överdriven känslighet för träningsdata (varians). Att hitta rätt balans hjälper till att minimera generaliseringsfel.
Börja bygga robusta AI-modeller med FlowHunt. Utforska intuitiva verktyg för att minimera generaliseringsfel och maximera noggrannhet i verkliga tillämpningar.
Träningsfel inom AI och maskininlärning är skillnaden mellan en modells förutsagda och faktiska utdata under träningen. Det är en nyckelmetrik för att utvärdera...
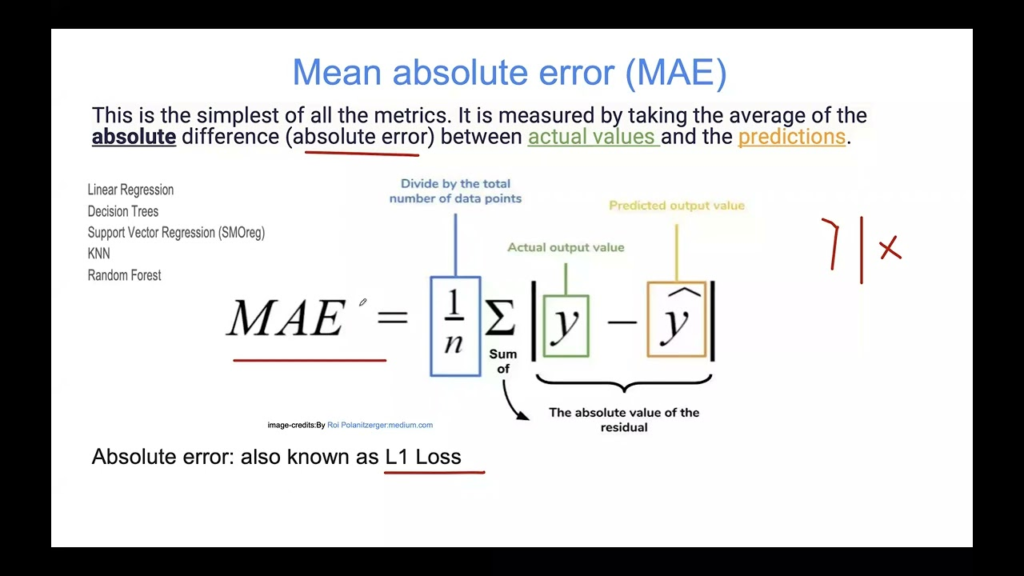
Medelfel (MAE) är ett grundläggande mått inom maskininlärning för att utvärdera regressionsmodeller. Det mäter den genomsnittliga storleken på felen i förutsäge...
Underfitting uppstår när en maskininlärningsmodell är för enkel för att fånga de underliggande trenderna i den data den tränas på. Detta leder till dålig presta...