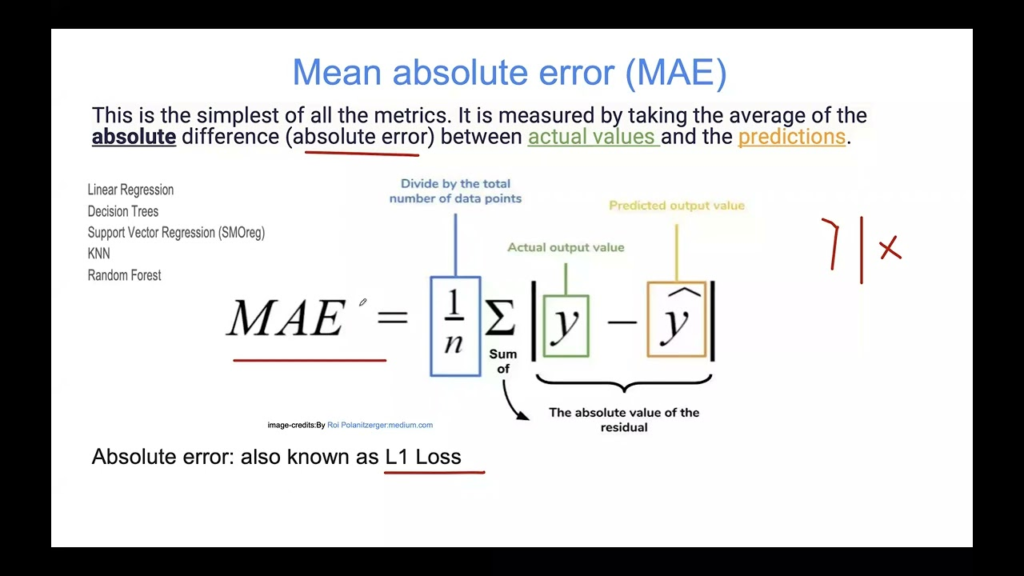
Medelfel (MAE)
Medelfel (MAE) är ett grundläggande mått inom maskininlärning för att utvärdera regressionsmodeller. Det mäter den genomsnittliga storleken på felen i förutsäge...
5 min läsning
MAE
Regression
+3
Medelgenomsnittlig precision (mAP) är en heltäckande metrik som utvärderar objektdetekteringsmodellers förmåga att korrekt upptäcka och lokalisera objekt i bilder.
Medelgenomsnittlig precision (mAP) är en avgörande prestationsmätare inom datorseende, särskilt för att utvärdera objektdetekteringsmodeller. Den ger ett enda skalarvärde som sammanfattar en modells förmåga att korrekt upptäcka och lokalisera objekt i bilder. Till skillnad från enklare noggrannhetsmått beaktar mAP både förekomsten av korrekt identifierade objekt och deras lokaliseringsnoggrannhet, vilket vanligtvis uttrycks genom förutsagda avgränsningsrutor (bounding boxes). Detta gör det till ett heltäckande mått för uppgifter som kräver exakt detektion och lokalisering, såsom autonom körning och övervakningssystem.
Average Precision (AP):
Precision-Recall-kurva:
Intersection over Union (IoU):
Komponenter i förväxlingsmatrisen:
Tröskelvärden:
För att beräkna mAP, följ dessa steg:
Generera förutsägelser:
Sätt IoU- och förtroendetrösklar:
Utvärdera förutsägelser:
Beräkna precision och recall:
Rita precision-recall-kurva:
Beräkna Average Precision (AP):
Beräkna mAP:
Prestandautvärdering:
mAP används i stor utsträckning för att utvärdera objektdetekteringsalgoritmer som Faster R-CNN, YOLO och SSD. Det ger ett heltäckande mått som balanserar precision och recall, vilket är idealiskt för uppgifter där både detekteringsnoggrannhet och lokaliseringsprecision är avgörande.
Benchmarking av modeller:
mAP är en standardmetrik i benchmark-tävlingar som PASCAL VOC, COCO och ImageNet, vilket möjliggör konsekventa jämförelser mellan olika modeller och dataset.
Autonoma fordon:
Objektdetektion är avgörande för att identifiera och lokalisera fotgängare, fordon och hinder. Höga mAP-värden indikerar pålitliga objektdetekteringssystem som kan öka säkerheten och navigeringen i autonoma fordon.
Övervakningssystem:
Noggrann objektdetektion med höga mAP-värden är viktigt för säkerhetsapplikationer som kräver övervakning och identifiering av specifika objekt eller aktiviteter i realtidsvideo.
AI-drivna tillämpningar:
mAP fungerar som en kritisk metrik för att utvärdera AI-modeller i automatiserade system som kräver exakt objekttolkning, såsom robotseende och AI-baserad kvalitetskontroll inom tillverkning.
Chattbotar och AI-gränssnitt:
Även om mAP inte är direkt tillämplig på chattbotar, kan förståelsen av mAP hjälpa till att utveckla AI-system som integrerar visuella perceptionsförmågor, vilket ökar deras nytta i interaktiva och automatiserade miljöer.
För att förbättra mAP för en modell, överväg följande strategier:
Datakvalitet:
Säkerställ högkvalitativa, välanotterade träningsdataset som korrekt representerar verkliga scenarier. Kvalitativa annoteringar påverkar direkt modellens inlärnings- och utvärderingsfaser.
Algoritmoptimering:
Välj toppmoderna objektdetekteringsarkitekturer och finjustera hyperparametrar för att förbättra modellens prestanda. Kontinuerlig experimentering och validering är nyckeln till optimala resultat.
Annoteringsprocess:
Använd noggranna och konsekventa annoteringsrutiner för att förbättra sanningsdata, vilket direkt påverkar modellträning och utvärdering.
Val av IoU och trösklar:
Experimentera med olika IoU- och förtroendetrösklar för att hitta den optimala balansen för just din tillämpning. Justering av dessa parametrar kan förbättra modellens robusthet och noggrannhet.
Genom att förstå och utnyttja mAP kan praktiker bygga mer exakta och tillförlitliga objektdetekteringssystem, vilket bidrar till framsteg inom datorseende och närliggande områden. Denna metrik fungerar som en hörnsten för att utvärdera effektiviteten hos modeller vid identifiering och lokalisering av objekt, och driver därmed innovation inom områden som autonom navigation, säkerhet och mycket mer.
Medelgenomsnittlig precision (MAP) är en central metrik för att utvärdera informationssökningssystem och maskininlärningsmodeller. Nedan följer några viktiga forskningsbidrag som fördjupar sig i MAP, dess beräkning och tillämpningar inom olika områden:
Efficient Graph-Friendly COCO Metric Computation for Train-Time Model Evaluation
Författare: Luke Wood, Francois Chollet
Denna forskning tar upp utmaningarna med att utvärdera COCO mean average precision (MAP) inom moderna djupinlärningsramverk. Den belyser behovet av en dynamisk status för att beräkna MAP, beroendet av globala dataset-statistik, samt hantering av varierande antal avgränsningsrutor. Artikeln föreslår en grafvänlig algoritm för MAP, vilket möjliggör utvärdering under träning och förbättrar synligheten av metrik under modellträning. Författarna tillhandahåller en noggrann approximationsalgoritm, en öppen källkodsimplementation och omfattande numeriska tester för att säkerställa metodens noggrannhet. Läs hela artikeln här
Fréchet Means of Curves for Signal Averaging and Application to ECG Data Analysis
Författare: Jérémie Bigot
Denna studie utforskar signalmedelvärdesbildning, särskilt i samband med att beräkna medelvärdesformen från brusiga signaler med geometrisk variation. Artikeln introducerar användningen av Fréchet-medel av kurvor, vilket utökar det traditionella euklidiska medelvärdet till icke-euklidiska rum. En ny algoritm för signalmedelvärdesbildning föreslås, som inte kräver någon referensmall. Metoden används för att uppskatta medelhjärtcykler från EKG-uppgifter och visar dess nytta för exakt synkronisering och medelvärdesbildning av signaler. Läs hela artikeln här
Mean Values of Multivariable Multiplicative Functions and Applications
Författare: D. Essouabri, C. Salinas Zavala, L. Tóth
Artikeln använder multipla zeta-funktioner för att etablera asymptotiska formler för medelvärdet av multivariabla multiplikativa funktioner. Den utökar tillämpningen till att förstå det genomsnittliga antalet cykliska delgrupper i vissa matematiska grupper och multivariabla medelvärden kopplade till minst gemensam multipel (LCM)-funktionen. Denna forskning är betydelsefull för dem som är intresserade av matematiska tillämpningar av MAP. Läs hela artikeln här
More Precise Methods for National Research Citation Impact Comparisons
Författare: Ruth Fairclough, Mike Thelwall
Denna artikel introducerar metoder för att analysera forskningsartiklars citeringspåverkan, och justerar för snedfördelade datamängder. Den jämför enkla medelvärden med geometriska medel och linjär modellering, och rekommenderar geometriska medelvärden för mindre urval. Forskningen fokuserar på att identifiera nationella skillnader i genomsnittlig citeringspåverkan, tillämpligt i policyanalys och akademisk benchmarking. Läs hela artikeln här
Medelgenomsnittlig precision (mAP) är en prestationsmätning som utvärderar objektdetekteringsmodeller inom datorseende. Den mäter hur väl en modell kan identifiera och lokalisera objekt, med hänsyn till både detekteringsnoggrannhet och precision vid objektlokalisering.
mAP beräknas genom att räkna ut Average Precision (AP) för varje klass med hjälp av precision-recall-kurvor och IoU-trösklar, och sedan ta medelvärdet av AP-poängen över alla klasser.
mAP ger en heltäckande utvärdering av en objektdetekteringsmodell, där både detekterings- och lokaliseringsnoggrannhet balanseras, vilket gör den avgörande för benchmarking och förbättring av AI-system i tillämpningar som självkörande fordon och övervakning.
mAP används ofta för att utvärdera objektdetekteringsmodeller för autonom körning, övervakningssystem, AI-driven tillverkning och informationssökningsuppgifter såsom dokument- och bildsökning.
För att förbättra mAP, fokusera på högkvalitativa annoterade dataset, optimera detekteringsalgoritmer, finjustera modellens tröskelvärden och säkerställ robusta tränings- och valideringsrutiner.
Upptäck FlowHunt’s plattform för att designa smarta chattbottar och AI-verktyg. Koppla ihop intuitiva block och automatisera dina idéer enkelt.
Medelfel (MAE) är ett grundläggande mått inom maskininlärning för att utvärdera regressionsmodeller. Det mäter den genomsnittliga storleken på felen i förutsäge...
Area Under the Curve (AUC) är en grundläggande mätvärde inom maskininlärning som används för att utvärdera prestandan hos binära klassificeringsmodeller. Det kv...
Djupuppskattning är en avgörande uppgift inom datorseende, med fokus på att förutsäga avståndet mellan objekt i en bild i förhållande till kameran. Det omvandla...
